Introducción
El caddy eléctrico está equipado con un sistema de control en velocidad y tracción que garantiza un rendimiento confiable y eficiente.
El corazón del sistema de control es un Curtis Controller 1234, reconocido por su fiabilidad y precisión en la gestión de la potencia entregada al motor.
Este controlador permite dos modos de funcionamiento: manual mediante pedal o automático, adaptándose a diferentes necesidades de conducción. El modo automático funciona a través de su comunicación CAN bus, que asegura una integración sencilla y robusta con otros sistemas electrónicos.
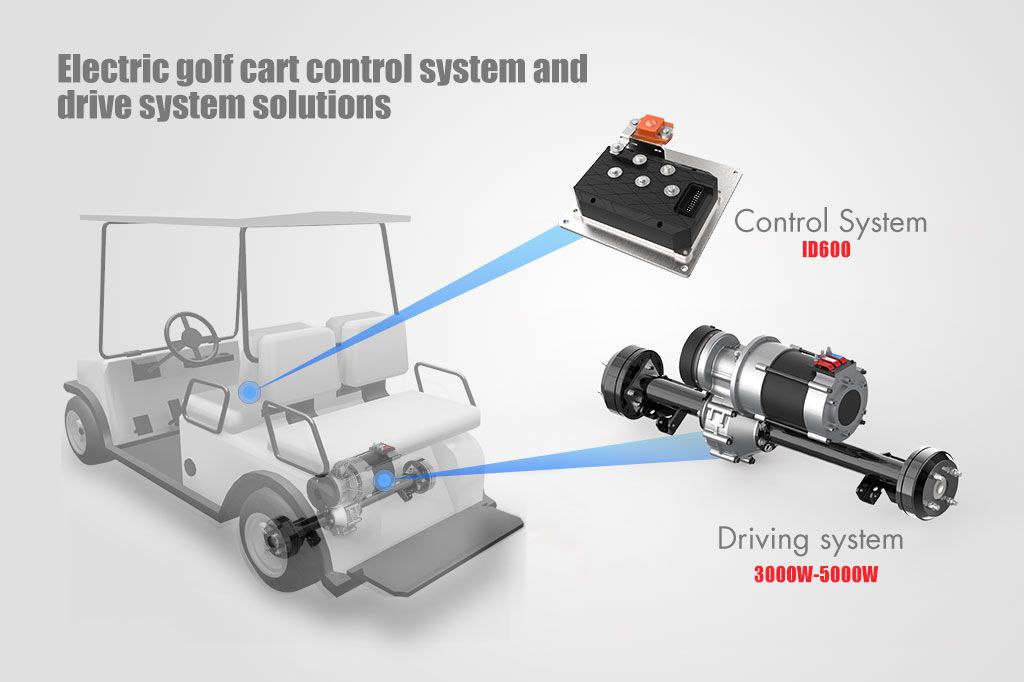
Por su parte, el sistema de tracción está impulsado por un motor eléctrico de 3.3 kW y 4800 rpm, el cual proporciona la potencia suficiente para mover el caddy con soltura, incluso en terrenos inclinados o con carga adicional. Esta combinación permite alcanzar un equilibrio óptimo entre eficiencia energética y desempeño, convirtiéndolo en una solución práctica y sostenible para el transporte en campos de golf, resorts o áreas residenciales.
En resumen, el controlador Curtis 1234 y el motor de 3.3 kW, junto con su doble modo de operación y conectividad CAN, hacen del caddy un vehículo versátil, confiable y de bajo mantenimiento, con una excelente relación entre potencia y eficiencia.
No Comments