Modelado Matemático
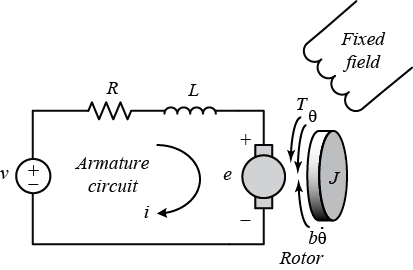
Motor DC con Reductora
Relación de reducción en velocidad y torque
\[\omega_{out} = \frac{\omega_m}{N}\]
\[T_{out} = N T_m \eta_g\]
Inercia y fricción reflejada
\[J_{eq} = J_m + \frac{J_g}{N^2}\]
\[B_{eq} = B_m + \frac{B_g}{N^2}\]
Modelo en espacio de estado
\[\begin{aligned}\dot{i} &= \frac{1}{L} \left( V - R i - K_e \omega_m \right) \\\dot{\omega}_m &= \frac{1}{J_{eq}} \left( K_t i - B_{eq} \omega_m - \frac{T_{load}}{N \eta_g} \right)\end{aligned}\]
No Comments