General
| Topic | Parameters that affect | File name |
| Controller | Event routines, etc. | SYS.CFG |
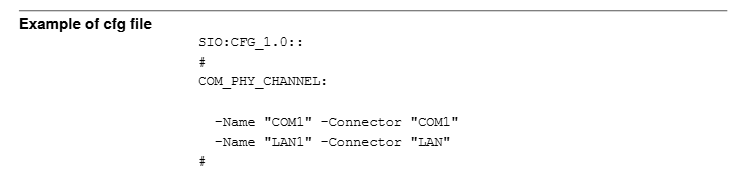
| Communication | Serial channels | SIO.CFG |
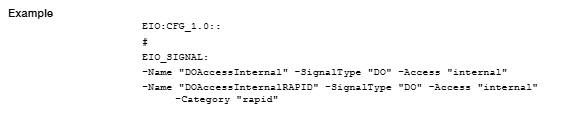
| IO Signals | I/O boards and signals | EIO.CFG |
| Manipulator | The robot and external axes |
MOC.CFG |
| Teach Pendant | Displaying data and access on the teach pendant |
MMC.CFG |
| Arc Welding | Arc welding | PROC.CFG |
Estos archivos vienen definidos por defecto en el disquete de System Parameters.
No hay documentación oficial de aquella época que haya encontrado que diga cómo se estructura los archivos de configuración, así pues toda información aquí se ha extraído por comparación entre varios archivos y "lógica" que parece tener. Si bien es cierto, que hay pistas en documentación actual.
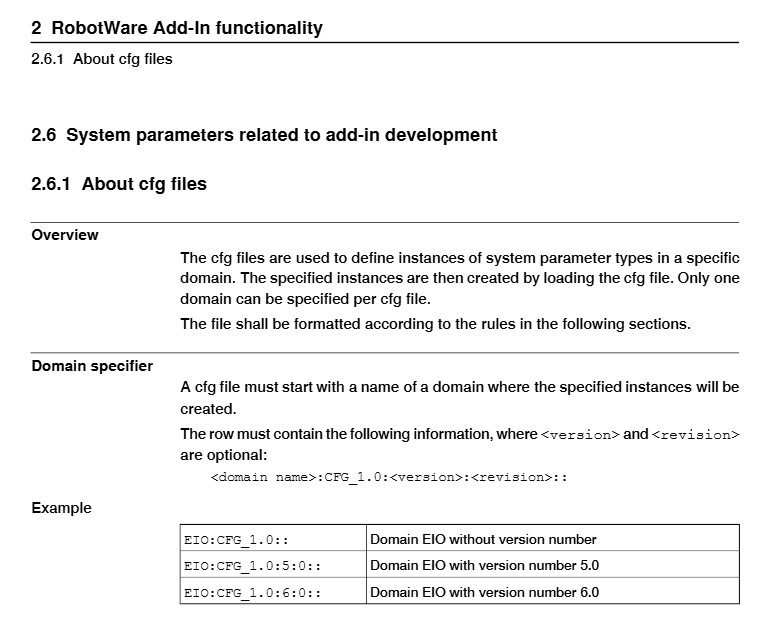
En todos estos archivos de configuración son archivos de texto plano y hay una cabecera al inicio del archivo del estilo:
SYS:CFG_1.0:2:0::
Estos parámetros vienen separados por : y siguiendo este ejemplo tenemos que,
SYS haciendo referencia al nombre del archivo,
CFG_1.0 haciendo referencia a que pueda haber más de una configuración
Seguido de 2:0:: esto para determinar a qué versión del software pertenece ya que también se ha encontrado archivos con 2:1::
Veáse el apartado de SYS.CFG.
Puede contener algo de información útil, pero no es directa, con pinzás.
https://manualsnet.com/abb/robotware-add-ins