Control de un servo motor MG996 con un protocolo digital
Este es un muy buen video para entender el funcionamiento de un servomotor
How to mechatronics - How Servo Motors Work & How To Control Servos using Arduino
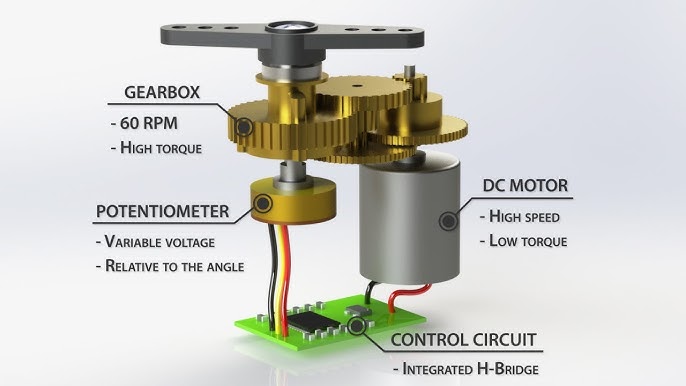
Internamente un servomotor sigue el siguiente esquema
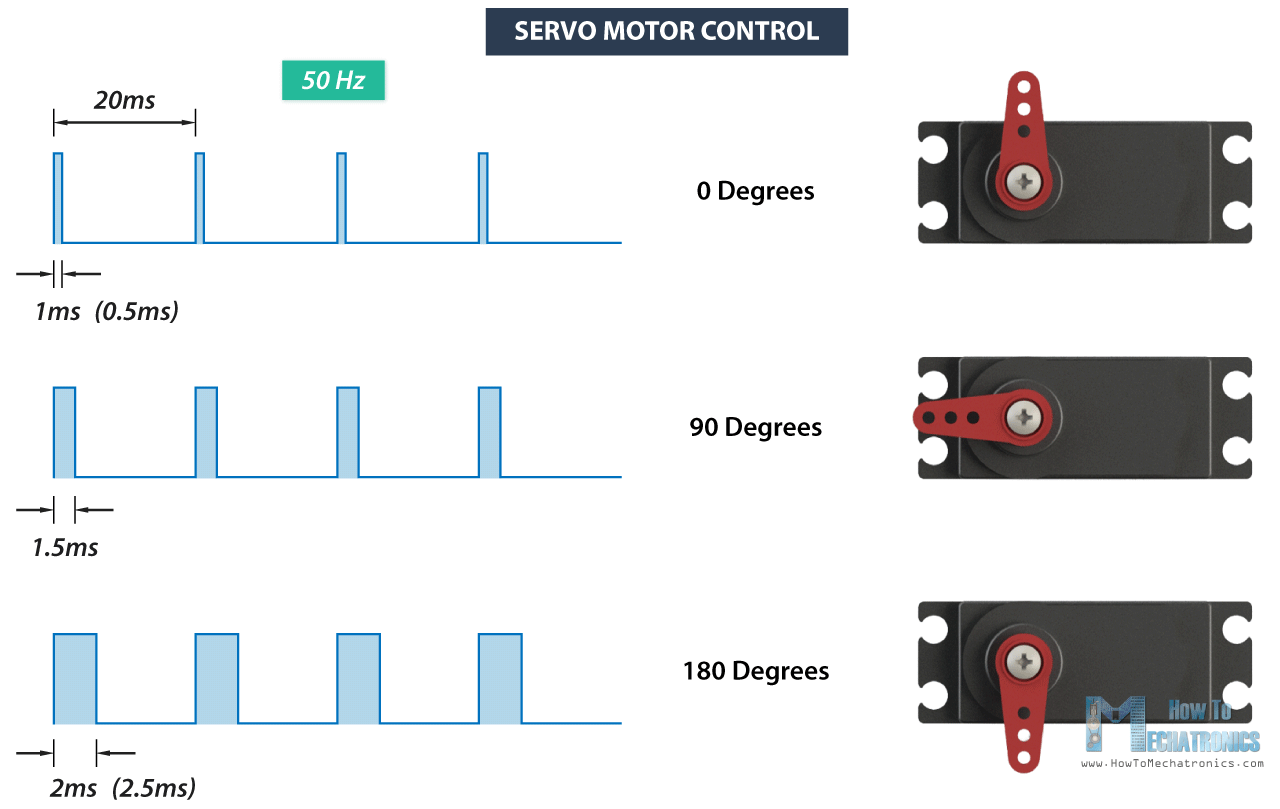
Su funciomiento en resumidas cuentas introduces una señal PWM con una frecuencia de 50Hz con un ancho de pulso de 1 milisegundos a 2 milisegundos. (50 Hz = 20 milisegundos de periodo)
Este el sistema de engranajes interno del servo

Vamos a hacer ingeniería inversa sobre el sistema de engranajes
Primero tenemos el motor con un piñon de salida con 10 dientes

Este engrana con el siguiente en la corona grande con 61 dientes de entrada y en la corona de salida tiene 12 dientes

Este engrana con el siguiente en la corona grande con 48 dientes de entrada y en la corona de salida tiene 12 dientes

Este engrana con el siguiente en la corona grande con 48 dientes de entrada y en la corona de salida tiene 17 dientes

Este engrana con el siguiente en la corona grande con 56 dientes de entrada hacia la salida.

El\[\text{Ratio ratiototal} total= de\left( transmisión\frac{10}{61} es\right) aproximadamente\times 13.56:1\left( \frac{12}{48} \right) \times \left( \frac{12}{48} \right) \times \left( \frac{17}{56} \right)\]
Es\[= decir,0.16393 por\times cada0.25 13.56\times vueltas0.25 del\times motor,0.30357 la\approx salida da 1 vuelta.0.0031\]