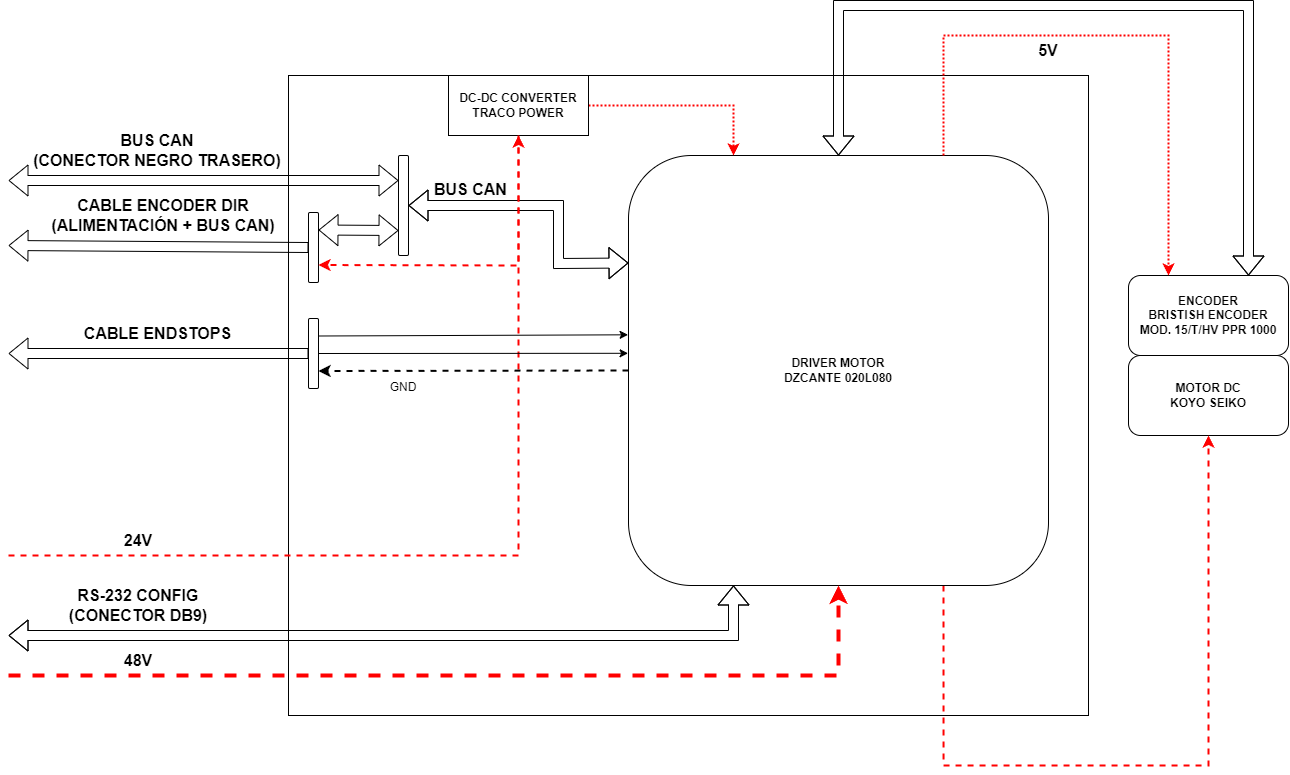
Sistema de dirección
Esquema

Electrónica
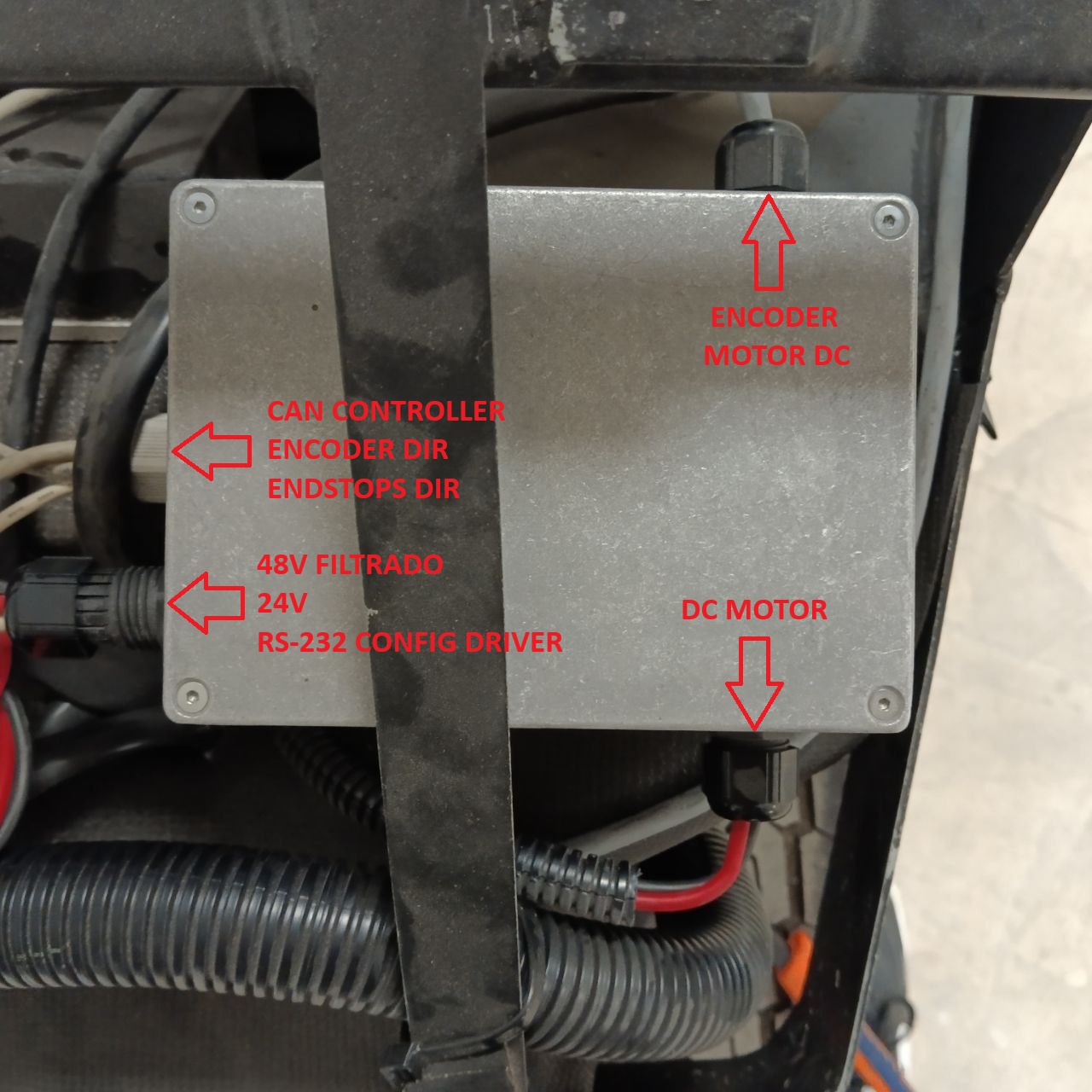
La electrónica del sistema de dirección está ubicado en la parte frontal del vehículo. Como podemos observar, se encuentra dentro de la caja metálica indicada en la imagen.

La caja del steering controller tiene varios cables de entrada y salida estos se resumen en 4 grupos:
Grupo 1:
- Encoder Motor DC (Bristish Encoder Product Company Modelo 15/T/HV PPR 1000)
Grupo 2:
- Motor DC (Koyo Seiko NO 45262??8)
Grupo 3:
- 48V Filtrados
- 24V
- Cable RS-232 configuración del driver (CONECTOR DB9 - PIN 3 RX VERDE, PIN 2 AMARILLO, PIN 5 GND MARRÓN)
Grupo 4:
- Cable BUS CAN
- Encoder Dirección
- Endstops Dirección (para limitar el rango de la dirección)
Grupo 1 y 2 actuan en conjunto:
Motor DC
Koyo Seiko NO 45262??8
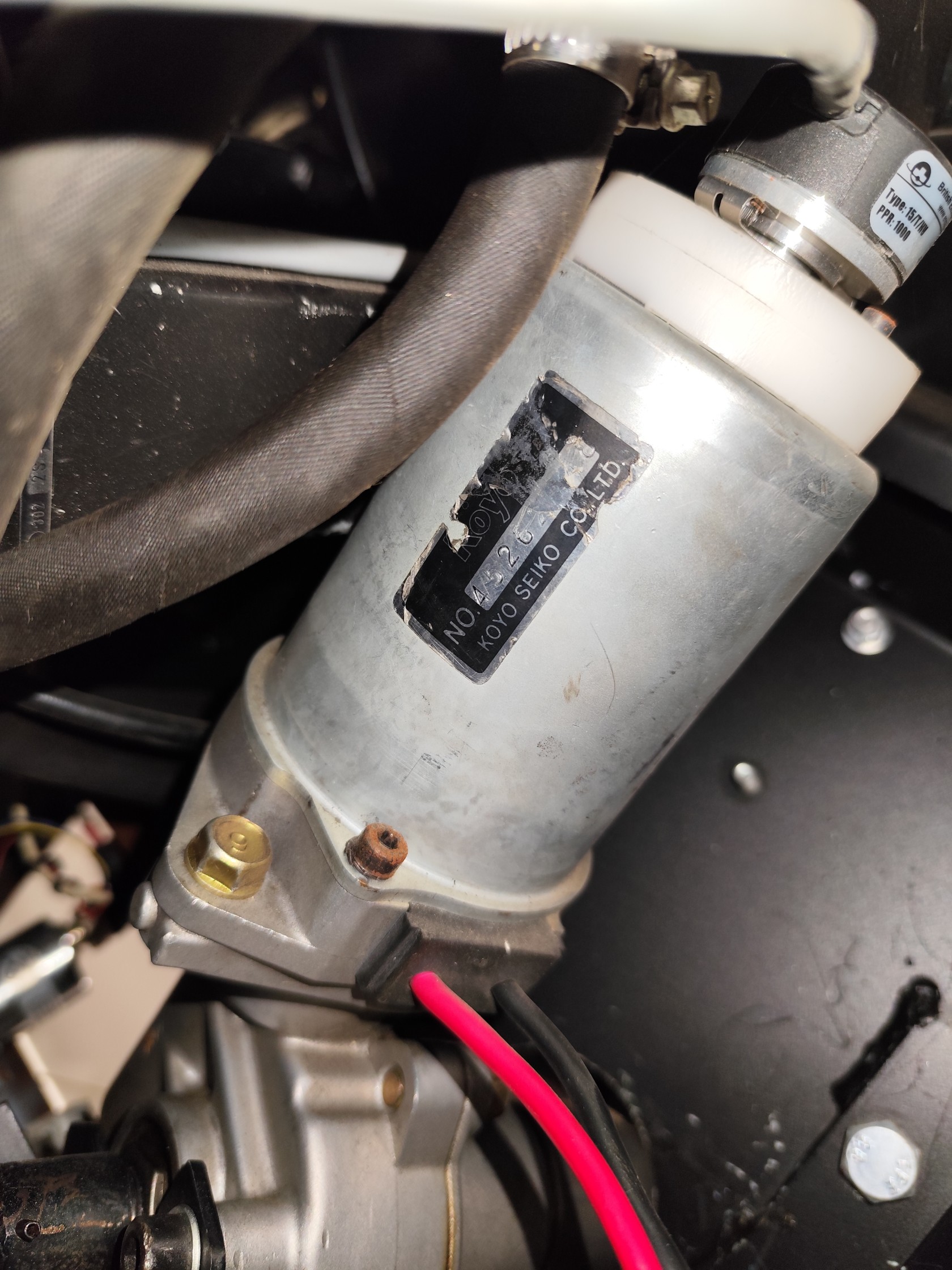
Encoder Motor DC
Bristish Encoder Products Company
Modelo 15/T/HV PPR 1000
Cableado:
| BLACK |
0 Volts (GND) |
| WHITE | VCC (+5V) |
| BROWN | CH A |
| RED | CH B |
| ORANGE | CH Z |
| YELLOW | CH -A |
| GREEN | CH -B |
| BLUE | CH -Z |
| SCREEN | CASE GROUND |

Grupo 4:
ENDSTOP DIRECCIÓN
| DERECHA | GND | NONE (NC) |
| RIGHT | ROJO (NO) | |
| IZQUIERDA | GND | NONE (NC) |
| LEFT | AMARILLO (NO) |
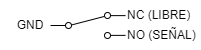
ENCODER CAN DIRECCIÓN
Bristish Encoder Products Company
Modelo SA36H Single Turn Absolute (01 o 04) POR CONFIRMAR SF 12-V3-P1-C1-A EMK
| NEGRO | GND | |
| BLANCO | VCC (12V o 24V) | Lo más seguro 24V |
| AMARILLO | CAN H (CNH) | BUS CAN CONECTOR NEGRO TRASERO |
| VERDE | CAN L (CNL) | BUS CAN CONECTOR NEGRO TRASERO |
| MARRÓN | GND CAN (GNDI) | BUS CAN CONECTOR NEGRO TRASERO |
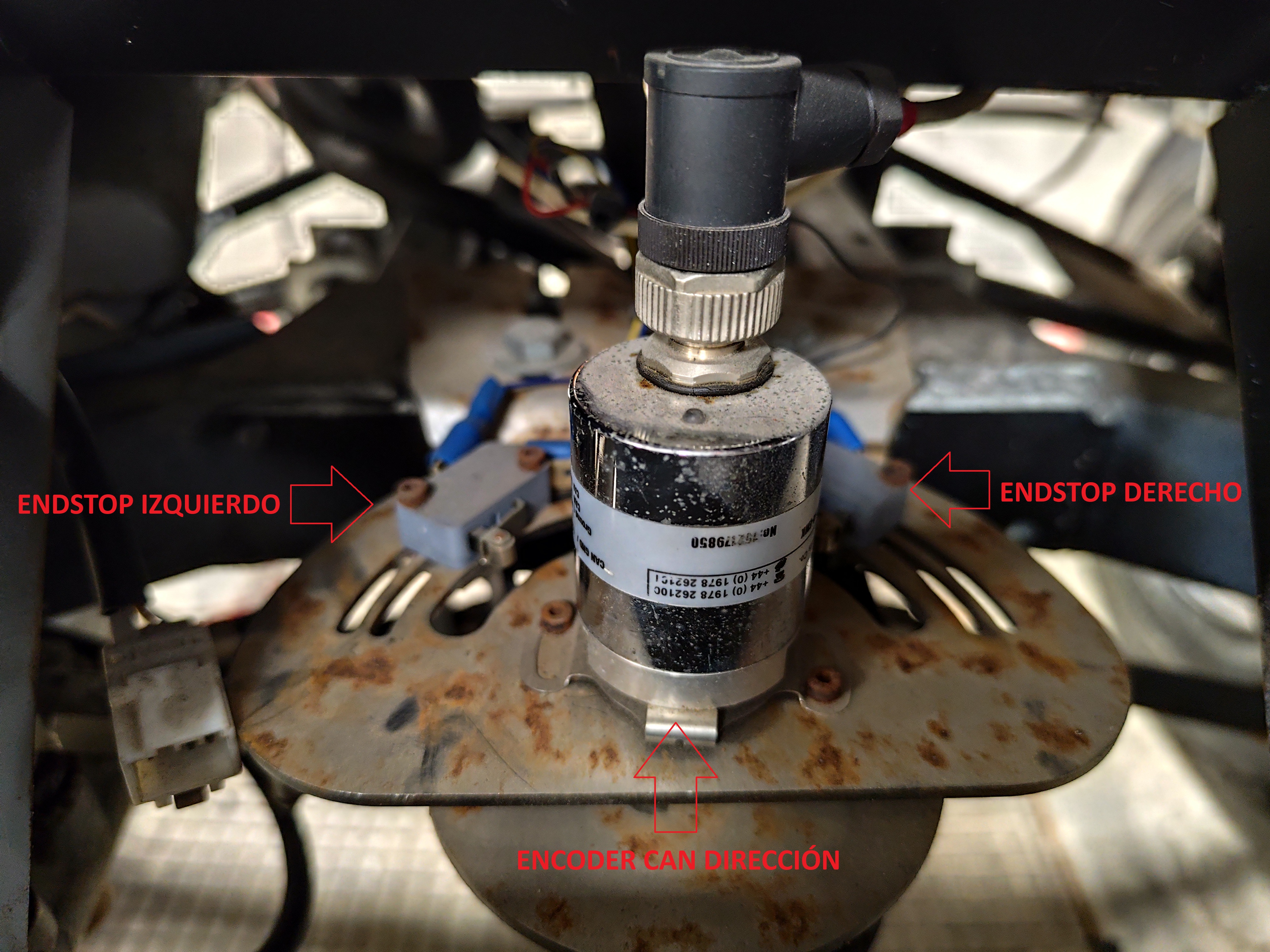

CONTROLADOR DIRECCIÓN DZCANTE-020L080
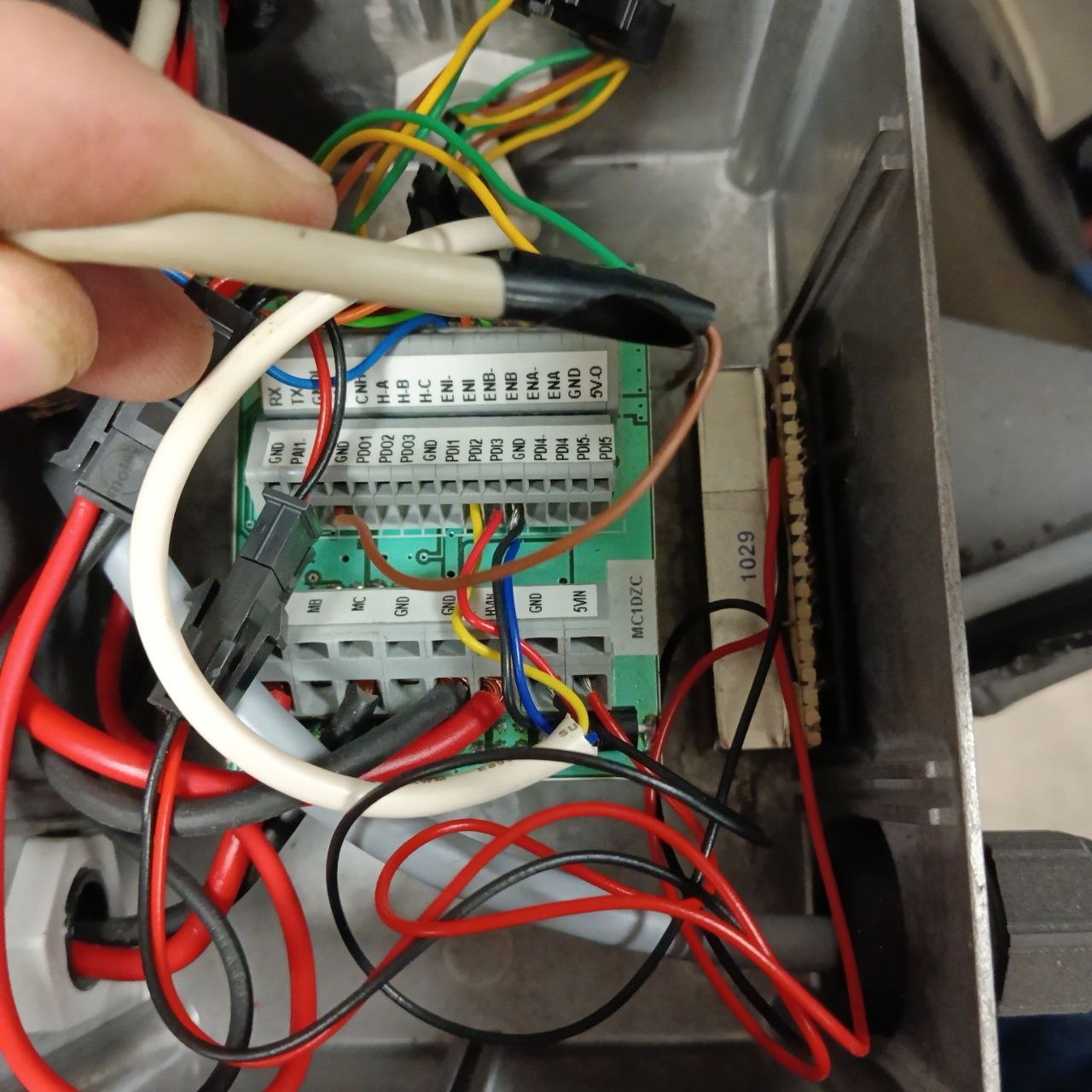
|
MA |
MOT DC DIR + (ROJO) |
| MB | NONE |
| MC | MOT DC DIR - (NEGRO) |
| GND | NONE |
| GND | GND 48V FILT (NEGRO) |
| HVIN | POS 48V FILT (ROJO) |
| GND | VOUT- TRACO DC-DC 5V |
| 5VIN | VOUT+ TRACO DC-DC 5V |
| GND | NONE |
| PAI1- | NONE |
| PAI1 | NONE |
| GND | DB9 RS-232 (MARRÓN) PIN 5 GND |
| PDO1 | NONE |
| PDO2 | NONE |
| PDO3 | NONE |
| GND | NONE |
| PDI1 | NONE |
| PDI2 | END STOP DIR LEFT (AMARILLO) |
| PDI3 | END STOP DIR RIGHT (ROJO) |
| GND | END STOP DIR GND (AZUL Y MARRÓN) |
| PDI4- | NONE |
| PDI4 | NONE |
| PDI5- | NONE |
| PDI5 | NONE |
| RX | DB9 RS-232 (VERDE) PIN 3 RX |
| TX | DB9 RS-232 (AMARILLO) PIN 2 TX |
| GNDI (CAN GND) | ENC CAN DIR GND (MARRÓN) + CABLE COM CAN CONECTOR NEGRO TRASERO |
| CNL (CAN L) | ENC CAN DIR CAN L (VERDE) + CABLE COM CAN CONECTOR NEGRO TRASERO |
| CNH (CAN H |
ENC CAN DIR CAN H (AMARILLO) + CABLE COM CAN CONECTOR NEGRO TRASERO |
| H-A | NONE |
| H-B | NONE |
| H-C | NONE |
| ENI- | ENC MOT DC - CH -Z (AZUL) |
| ENI | ENC MOT DC - CH Z (NARANJA) |
| ENB- | ENC MOT DC - CH -B (VERDE) |
| ENB | ENC MOT DC - CH B (ROJO) |
| ENA- | ENC MOT DC - CH -A (AMARILLO) |
| ENA | ENC MOT DC - CH A (MARRÓN) |
| GND | ENC MOT DC - GND (NEGRO) |
| 5V-O | ENC MOT DC - VCC (5V) (BLANCO) |
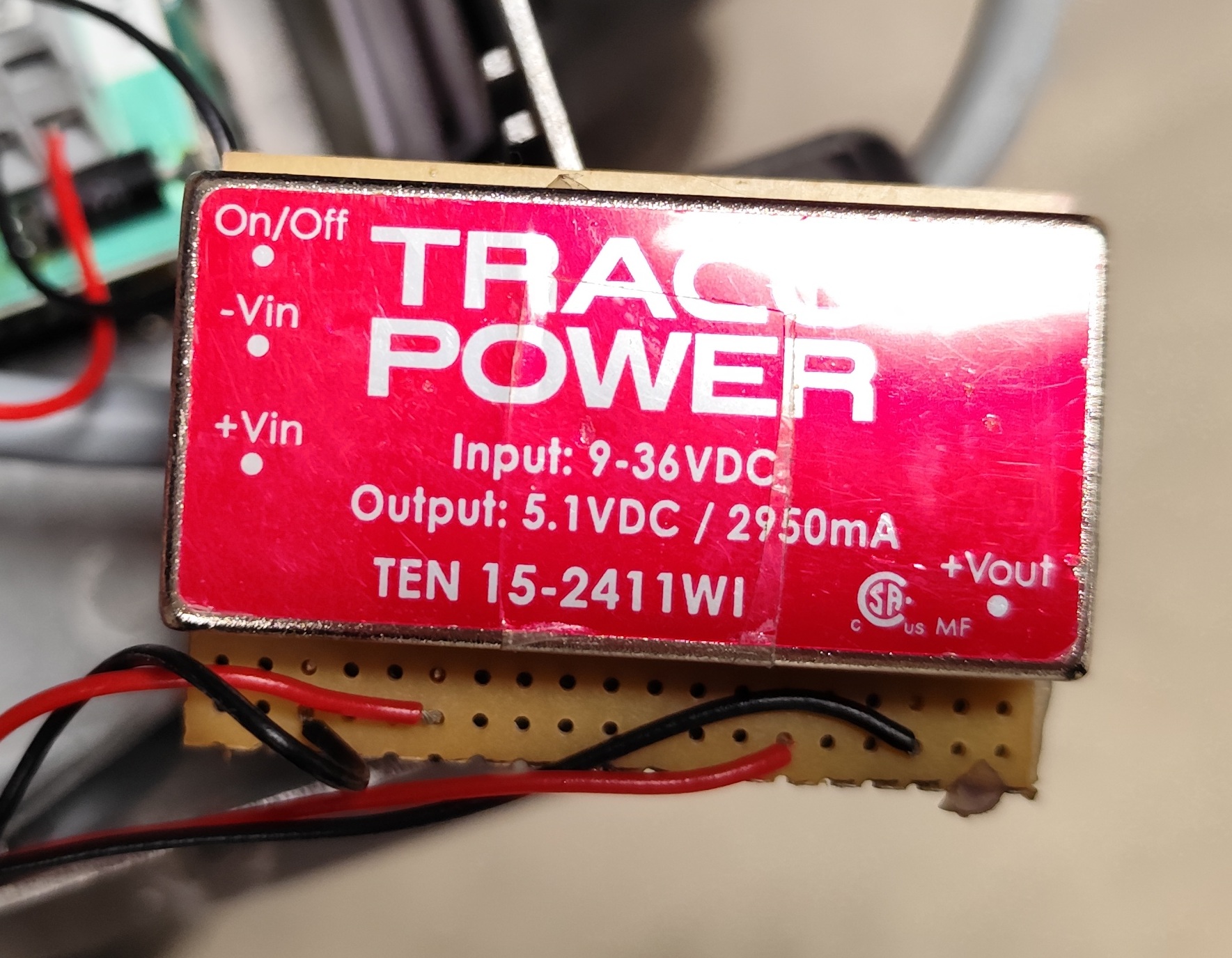
CONVERTIDOR DC-DC
Modelo TRACO POWER TEN 15-2411WI
Este controlador también necesita un convertidor DC-DC para ser alimentado a 5V, este está alimentado a los 24V que entran en la caja y está conectado a la entrada 5IN y GND.
Introducción
Conversión del proyecto de ROS 1 a ROS 2
Análisis inicial del proyecto rbcar_steering_controller (enfoque hardware)
A alto nivel, este paquete ROS controla el giro (steering) de un vehículo (Rbcar) usando:
- Un variador/drive de motor (AMC DZCANTE-020L080) controlado por CANopen para mover el actuador de dirección en modo posición.
- Un encoder absoluto EPC (familia MA) conectado también por CANopen para medir el ángulo real de la dirección.
- Una tarjeta CAN PEAK (PCAN) como interfaz física con el bus CAN.
A continuación desgloso los bloques de hardware y cómo se integran:
1) Bus CAN y hardware de comunicaciones
- Interfaz: PEAK PCAN (usuarios típicamente PCAN-PCI, PCAN-USB, etc.). En el launch se usa el dispositivo “/dev/pcanpci1”; por defecto en código “/dev/pcan32”.
- Velocidad: 1 Mbit/s (CAN_BAUD_1M).
- Librerías: libpcan (PCan.h/PCan.cc) para abrir y configurar el canal, y enviar/recibir tramas CAN.
- Protocolo: CANopen “ligero” implementado manualmente, sin stack externo. Se envían NMT (Start, Stop, Reset Comm/Node), SDO (objetos de configuración/lectura) y PDOs (tramas de proceso).
- Mecanismo de supervisión: Node Guard/Heartbeat (cíclicamente se lanza un RTR a 0x700+NodeID y se comprueba el estado; si no hay respuesta dentro de NMT_TIMEOUT=2s se considera fallo de comunicación).
2) Drive de motor: AMC DZCANTE-020L080
- Función: accionar el actuador de dirección en modo posición (Position Mode).
- Nodo CAN: ID configurable (por defecto can_motor_id=1).
- Clase base Dzcante020l080.* encapsula objetos CAN (índices SDO/PDO) para este drive:
- ControlWord (0x6040) con comandos: ENABLE_OP, SHUTDOWN, SWITCH_ON, QUICK_STOP, DISABLE_VOLT, RESET.
- Modos de operación (0x6060) = Position/Velocity/Home.
- RPDO y TPDO: configuración de COB-IDs y modos de transmisión (objetos 0x140x/0x180x y similares).
- Lecturas: StatusWord (0x6041), Drive Status extendido (0x2002 subíndices 1..6), posición (0x6064), velocidad (0x60FF), corriente (0x6077), tensión bus DC (0x200F.01).
- Clase MotorDrive.* añade:
- State machine interna (INIT/READY/EMERGENCY...) y comunicación (OPERATIONAL/FAULT...).
- Hilos auxiliares:
- ControlCommunicationThread: envía Node Guard y vigila tiempos para marcar FAULT si no hay respuesta.
- ReadSDOMessagesThread: lectura cíclica de Drive Status, tensión del bus, entradas digitales, posición actual, etc., y cálculo de medias.
- Configuración CAN:
- Reset/Preoperational, setting de Node Guard (Guard Time 0x100C, Life Factor 0x100D), Event Action (0x2065.21), Recovery Time, TPDOs/RPDOs para posición/velocidad.
- Gestión de estados de variador: dsDesiredStatus vs dsStatus. Cambia de estados enviando ControlWord con tiempos de guarda.
- Señales de diagnóstico: descompone StatusWord y 0x2002.* en flags con máscaras y temporizadores para logging-control.
- Clase MotorPosition.* especializa a Position Mode:
- Inicialización: secuencia ControlWord (Disable Voltage, Shutdown, Switch On, Enable Operation) y lectura de modo operación.
- Homing: soportado (START_HOME / STOP_HOME), flags de homing completo y cambio a modo posición.
- SetMotorPosition: envía objetivo vía RPDO21 (POSITION_PDO_MSG) en cuentas (counts).
3) Encoder absoluto EPC (familia MA) por CANopen
- Función: medir posición de la dirección en cuentas absolutas.
- Nodo CAN: por defecto can_encoder_id=0x7F.
- Clase EpcMaCanOpen.* maneja NMT/SDO/PDO básicos para estos encoders (IDs TPDO1 0x180+ID, TPDO2 0x280+ID).
- Clase EpcEncoder.*:
- State machine similar (OPERATIONAL/FAULT...).
- Hilo de comunicación para Node Guard.
- Procesa TPDO1/TPDO2 con cuentas del encoder (encoder_counts).
- El nodo de alto nivel convierte estas cuentas a ángulo mediante una calibración lineal.
4) Nodo ROS de control de dirección
- Binario: rbcar_steering_controller.cpp.
- Flujos:
- Parametrización vía ROS params y YAML (config/config.yaml): rangos de encoder, zero, resolución, calibración lineal (y=Ax+B), límites angulares y puntos extremos.
- Inicializa PCan (a 1M), crea objetos MotorPosition (drive) y EpcEncoder (encoder) con sus IDs y desired_freq (50 Hz).
- start(): Setup y Start de ambos (abre CAN, setea, pone OPERATIONAL, lanza hilos).
- Loop spin(): a 50 Hz:
- Envío SYNC (0x80).
- Lectura de hasta 100 mensajes CAN y dispatch a Motor/Encoder para proceso (PDO/SDO/NMT/EMCY).
- Publicación del estado: SteeringControllerStatus (estado motor+encoder, cuentas abs y motor, posición angular).
- Suscripciones:
- command_position_counts (std_msgs/Int32): manda counts al motor (posición absoluta en cuentas del motor).
- command_angle (std_msgs/Float64): convierte ángulo deseado a cuentas absolutas y luego a cuentas de motor según relación abs_to_motor, y envía referencia de posición al drive.
- Servicio:
- set_motor_status (SetMotorStatus.srv): permite fijar estado del drive: OPERATION_ENABLED, QUICK_STOP, READY_TO_SWITCH_ON.
- Diagnósticos:
- diagnostic_updater reporta estado de comunicación y estado del drive, y supervisa frecuencia de comandos.
Qué tener en cuenta para replicar:
- Calibración mecánica: el YAML aporta relación entre encoder absoluto y cuentas del motor, y los extremos físicos. Esto es clave para que el comando en rad -> counts funcione correctamente.
- La variable abs_to_motor se calcula como motor_counts_range / abs_counts_range. Debes medir ambos rangos en tu mecánica y actualizar config.yaml.
- value_calibrate_a y value_calibrate_b definen la recta ángulo = -a*counts + b. Ajustarlos a tu encoder y cinemática.
- Límites de ángulo: extrem_angle_left/right y sus points asociados (extrem_points_left/right) fijan saturaciones de seguridad.
5) Resumen de la secuencia de arranque/operación
- PCan abre el dispositivo y configura el bitrate.
- MotorDrive:
- Reset CAN Comm -> Preoperational
- Configura PDOs/Node Guard/Eventos
- Init drive (ControlWord sequence), lee modo operación
- Start Communication (NMT Start), pasa a OPERATIONAL
- Lanza hilos de Node Guard y lecturas SDO periódicas
- EpcEncoder:
- Reset/Preoperational
- (En este código no reconfigura PDOs del encoder)
- Start Communication a OPERATIONAL
- Lanza hilo de Node Guard
- Bucle 50 Hz:
- Envía SYNC
- Lee paquetes CAN y los distribuye
- Publica estado (counts + angle)
- Comandos:
- command_angle -> se traduce a counts del encoder y luego a counts del motor y se envía la posición al drive por RPDO21.
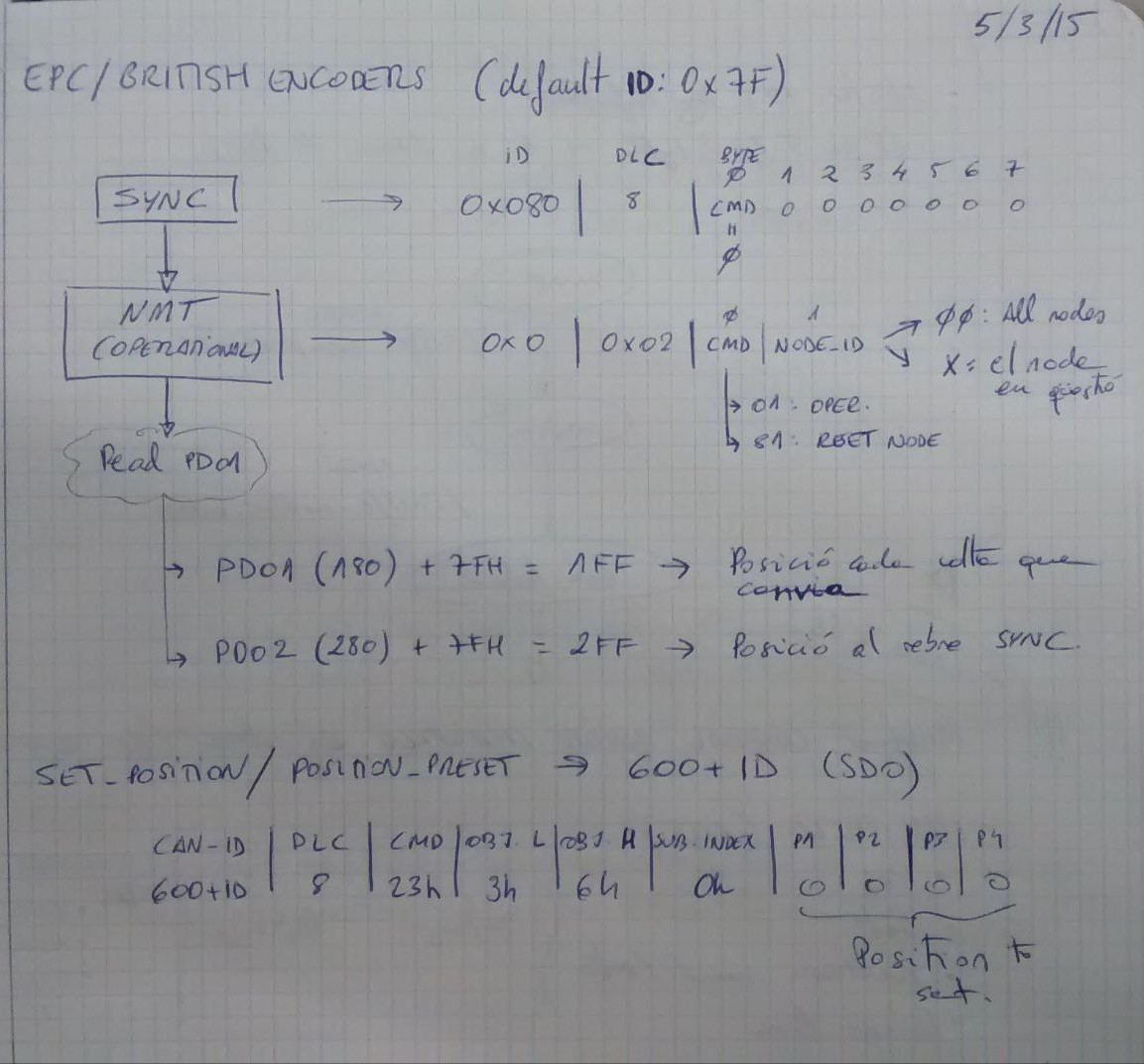
6) Señales CAN-clave y mapeo rápido
- NMT (ID 0x000): Start 0x01, Stop 0x02, Reset Comm 0x82, Reset Node 0x81, Preop 0x80 (DATA[0]=cmd, DATA[1]=node).
- Node Guard RTR a 0x700+NodeID, respuesta en 0x700+NodeID con estado (OPERATIONAL=0x05/0x85, PREOP=0x7F/0xFF, STOPPED=0x04/0x84).
- SYNC: 0x80 sin datos.
- Drive:
- SDO server 0x600+ID (Write/Read a objetos 0x6040 ControlWord, 0x6060 Mode, 0x607A Position, 0x60FF Velocity, 0x2002 Drive Status, 0x200F.01 DC Bus, 0x6064 Position actual).
- RPDO21 (0x280+ID) para consigna de posición (4 bytes little-endian).
- TPDO1/21/22 para StatusWord/Position/Velocity según configuración.
- Encoder EPC:
- TPDO1 (0x180+ID) / TPDO2 (0x280+ID): se usan los 2 bytes bajos como cuentas (el código así lo interpreta).
- Node Guard/Heartbeat igual que el drive.
7) Qué adaptar en tu nuevo proyecto (hardware)
- Si cambias:
- Interfaz CAN: sustituye PCan.* por tu driver y conserva la API Send/Read/Setup/Configure.
- Drive: si el drive no es AMC DZCANTE-020L080, necesitarás:
- Revisar/actualizar índices SDO, COB-IDs, TPDO/RPDO, escalados, y status words.
- Ajustar secuencias de ControlWord y modos de operación.
- Encoder absoluto: si otro fabricante/protocolo, cambiar mapeo de TPDOs y cómo se extraen cuentas.
- Mecánica: recalibrar config.yaml para rangos, cero y linealización ángulo–cuentas.
- Mantener:
- Supervisión de comunicación (Node Guard/Heartbeat) o migrar a Heartbeat puro si tus nodos no usan Node Guard clásico.
- Seguridad: QUICK_STOP y manejo de fallos del drive.